HT2 - Create a Digital Terrain Model from a T-Lidar point cloud¶
This tutorial uses the following script in the Computree HowTo subfolder: HT2_Create_DTM.xsct2
Objectives¶
This tutorial shows how to :
- Open a point cloud
- Add the DTM creation step
- Configure the tool parameters
- Export the model in a raster format
Open a ploint cloud¶
Please refer to tutorial HT1 - Load, visualize, crop and export a T-Lidar point cloud.
Add the DTM creation step¶
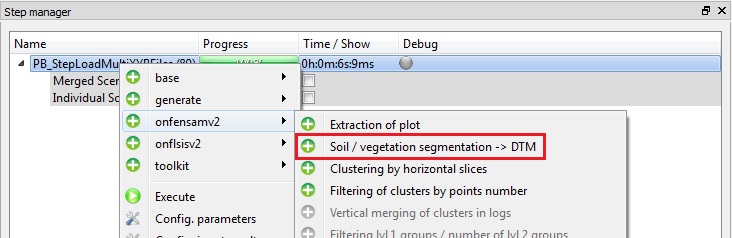
The OE_StepExtractSoil03 step is found in the onfensamv2 plugin. This step distinguishes ground points from vegetation points and generates:
- a Digital Terrain Model (DTM)
- a Digital Surface Model (DSM)
- a Digital Height Model (DHM)
To add a step, right click on the previous one and then select the tool. Select the onfensamv2 plugin, and then the Soil / vegetation segmentation → DTM step.
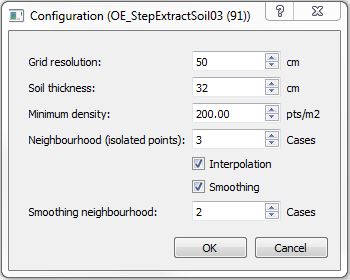
Tool parameters configuration¶
Tool steps and parameters:
- A Zmin grid is created at the specified Grid resolution. The resolution must be in centimeters. The same resolution will be used for the output models.
A 50 cm resolution is suitable for a moderate slope plot. For a steeper slope, a finer resolution is recommended.
- Point density is calculated for points located between Zmin and “Zmin + Soil thickness”.
The Soil thickness parameter depends on the grid resolution. The larger the pixels are, the greater the parameter value must be, so that all ground points are included.
- NULL value is given to the grid’s pixels that have a point density smaller than the Minimum density.
- If the Interpolation box is checked, NULL values ares replaced by the average of natural neighbors.
- If the Smoothing box is checked, each cell is transformed according to the K-Nearest Neighbor (k-NN) method. K (Neighborhood in number of pixels) must be specified.
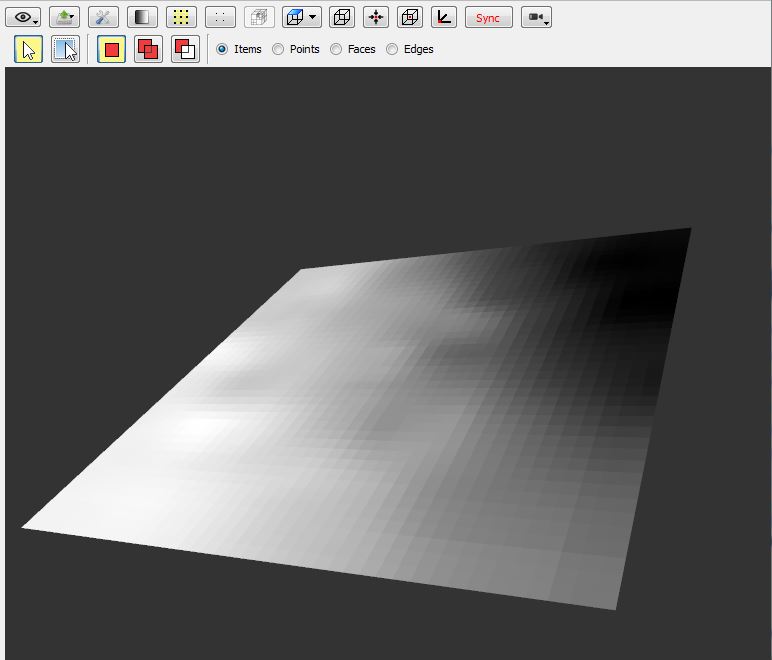
Here is an exemple of a Digital terrain Model (DTM):
Export the model in a raster format¶
Please refer to tutorial HT1 - Load, visualize, crop and export a T-Lidar point cloud.
The Grilles 2D, ASCII ESRI Grid format is recommended.
 ...version française de cette page
...version française de cette page