 ...version française de cette page
...version française de cette page | ...version française de cette page |
This tutorial shows how to:
This platform operates in steps that are displayed in the StepManager window. To open a file, you must add a new step. Use the  button and select the .xyb file.
button and select the .xyb file.

To actually begin charging the file, press the  button.
button.
When a step execution is completed, the progressing bar is full and the result can be diplayed by activating the Result checkbox in the Step manager window :

You may notice that subresults are created as well in the Model manager :
To view a particular element, activate the corresponding checkbox in the Model manager window. To display scan points in the 3D view, check the Scene box.
N.B. : Use the  button to ajust camera view to visible elements.
button to ajust camera view to visible elements.
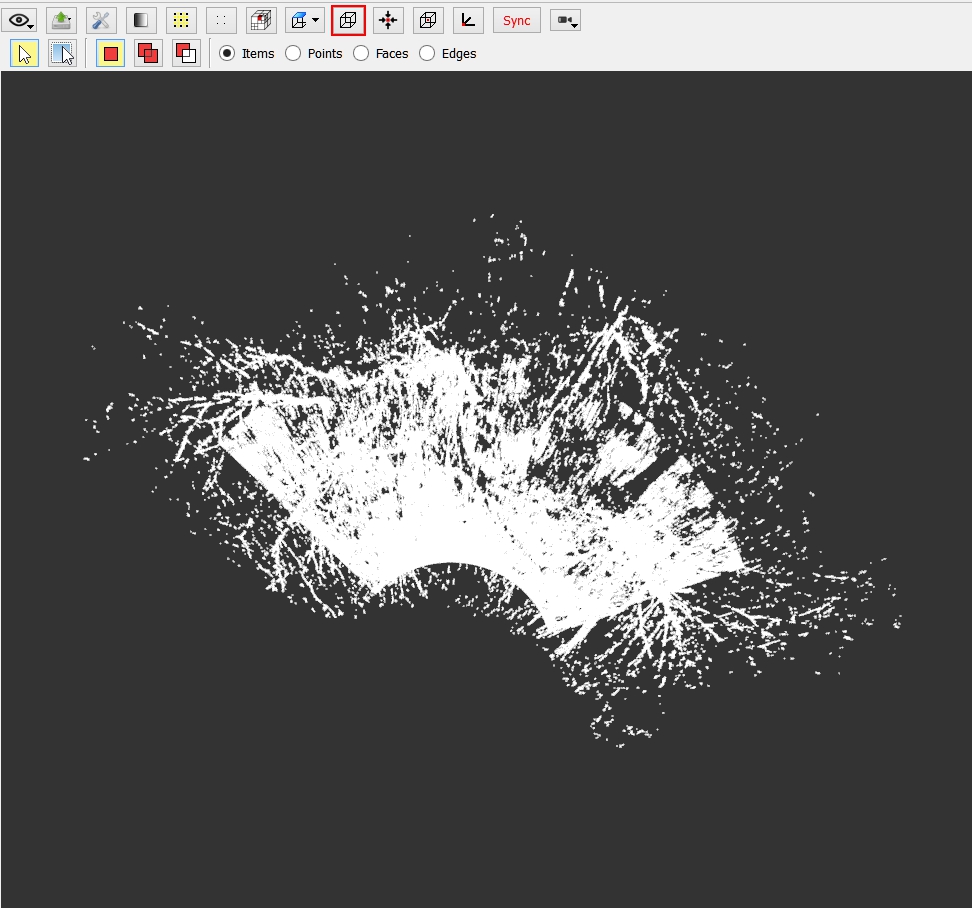
In the 3D view, you can manually adjust view using the left click button (rotation), the right click button (translation) and the scroll wheel (zoom).
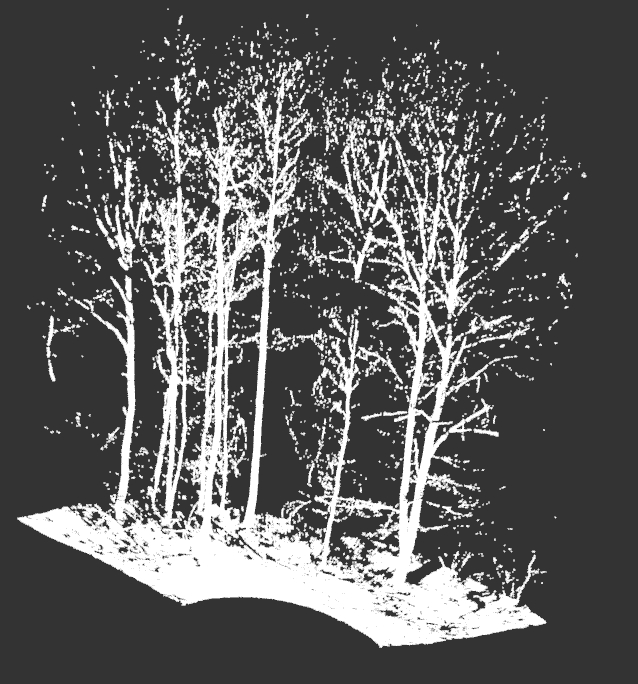
Exemple for another perspective :
The points intensity can also be displayed. In order to do that, use the  button that gives access to the Configure colors window :
button that gives access to the Configure colors window :
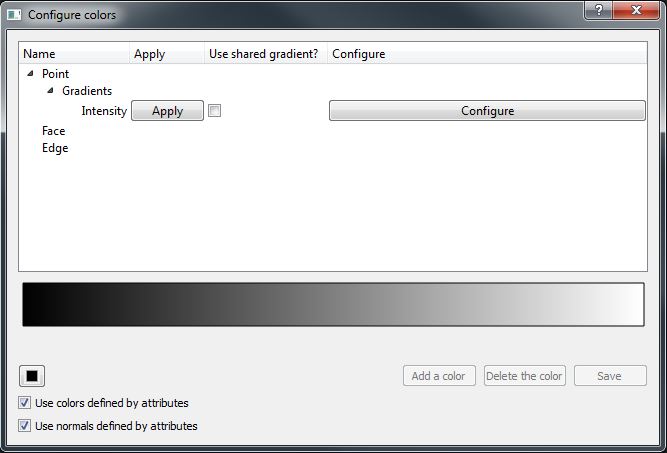
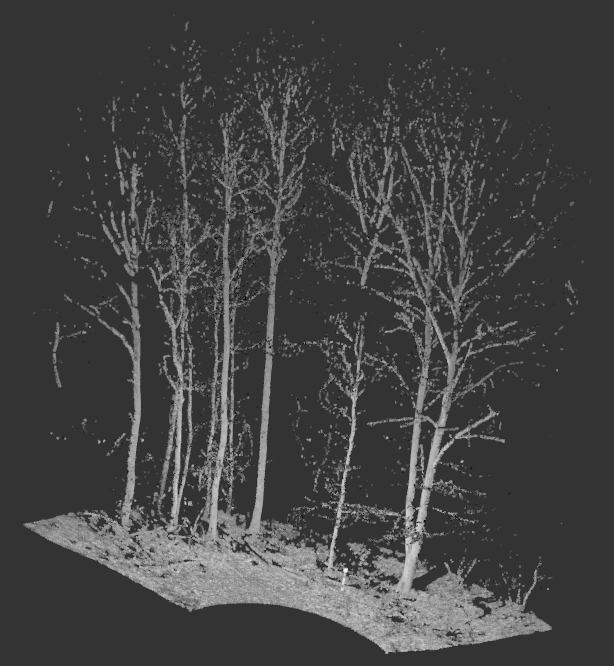
Click on the Apply button to display intensity :
There are different possibilities in order to extract a portion of the point cloud.
The HT1_Load_Crop_Export_Cloud.xsct2 script uses two of these methods :
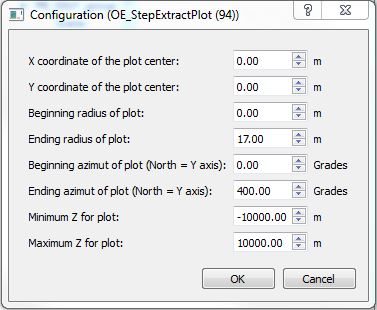
The OE_StepExtractPlot tool takes as parameters :
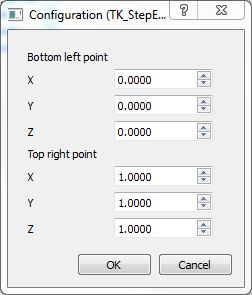
The TK_StepExtractBox tool takes as parameters :
The  button enables you to export a point cloud to a specified format.
button enables you to export a point cloud to a specified format.

| Back to How Tos list |